Image extraction from: Adaptive hierarchical origami-based metastructures, DOI: 10.1038/s41467-024-50497-5
Университет штата Северная Каролина разрабатывает робота, меняющего форму, вдохновленного оригами
Время для прочтения: 2 мин.
Обновлено Апр 8, 2025
-
![Киара Фаббри]()
-
![Команда локализации и перевода]()
Перевод выполнен Команда локализации и перевода Услуги локализации и перевода

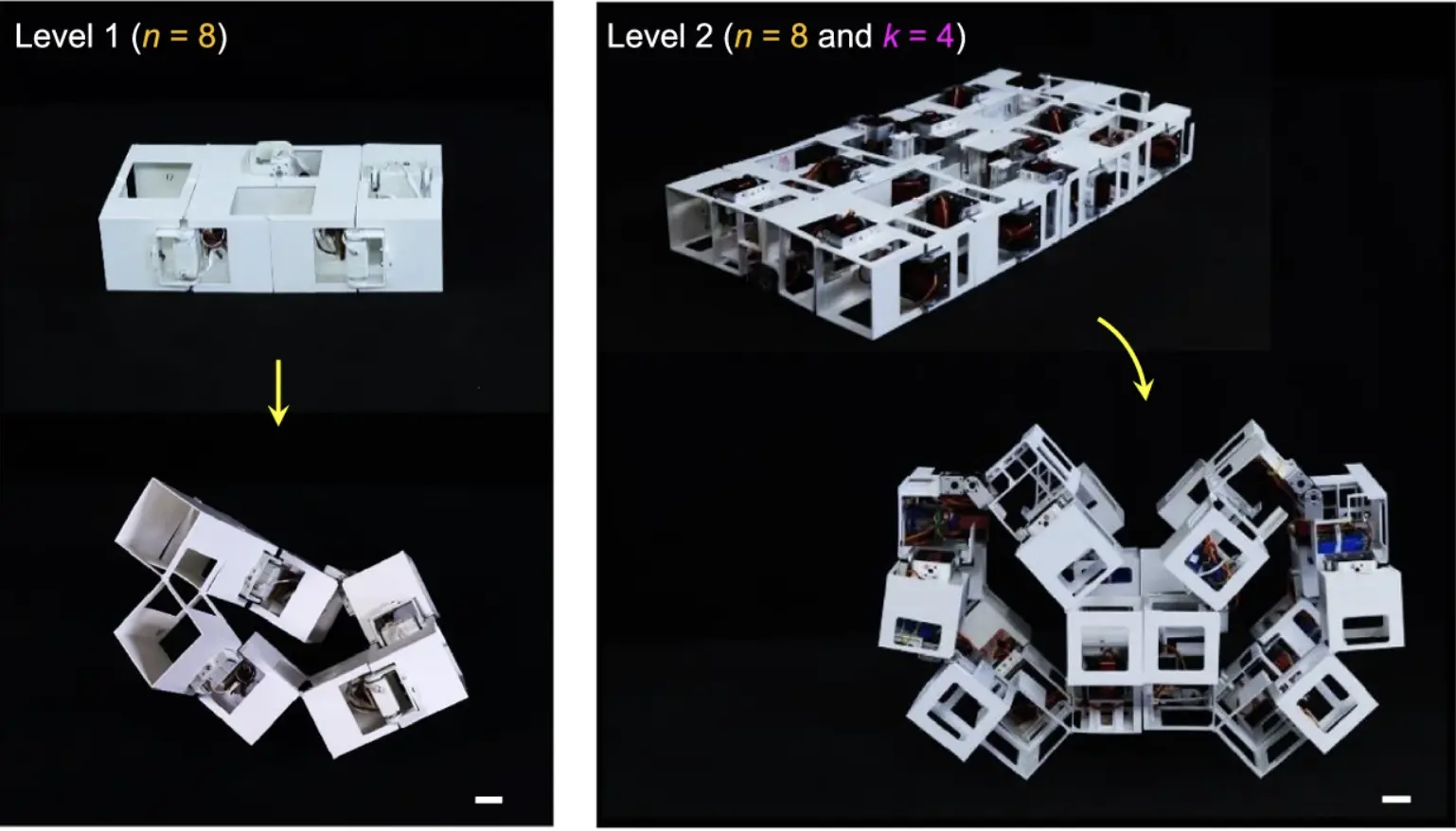
Команда исследователей из Университета Северной Каролины создала структуру из пластикового куба, способную преобразовываться в более чем 1000 конфигураций, используя всего три мотора. Это прорыв может привести к разработке универсальных роботов для различных приложений, в частности, в архитектуре и космическом исследовании.
В своей исследовательской работе команда объясняет, как они использовали 3D-принтер для сборки 36 полых пластиковых кубов, соединенных вращающимися петлями. Некоторые петли были зафиксированы металлическими штифтами, в то время как другие были моторизованы. Такая конфигурация позволила структуре преобразовываться в различные формы, включая туннели, мосты и многоэтажные структуры.
Меняя форму, трансформеры-боты могут передвигаться в любом направлении и переносить грузы, вес которых в три раза превышает их собственный вес, причем все это возможно без использования ног.
Меняющие форму боты могут адаптироваться к различным задачам и условиям окружающей среды, что делает их потенциально полезными для многофункционального использования в таких областях, как исследование космоса. Способность ботов переносить грузы и менять форму по мере необходимости может кардинально изменить подход к дизайну искусственных систем.
«Мы думаем, что эти объекты можно использовать в качестве развертываемых, настраиваемых космических роботов и обитаемых модулей,» —заявил Антонио Ди Лалло, один из основных авторов статьи. «Это модульная конструкция, поэтому вы можете отправить ее в космос в сложенном виде и собрать как убежище или обитаемый модуль, а затем разобрать его.»
Несмотря на огромный потенциал этой технологии, есть некоторые ограничения. Необходимо улучшить грузоподъемность структур, особенно в больших масштабах. Существующие прототипы ограничены в своей способности выдерживать значительный вес из-за материалов, используемых для петель, которые жертвуют прочностью ради гибкости. Кроме того, исследователи отметили трудности в полном использовании возможностей изменения формы для разнообразного роботизированного перемещения в неструктурированных условиях.
Исследование открывает новые пути для будущих исследований. «Мы хотим создать более устойчивую структуру, которая может выдерживать большие нагрузки», — заявил Янбин Ли, соавтор статьи, в новостях Университета штата Северная Каролина. «Если мы хотим создать форму автомобиля, например, как мы можем спроектировать первую структуру, которая может превратиться в форму автомобиля? Мы также хотим проверить наши структуры на реальных примерах, например, на космических роботах.»
Исследование, опубликованное в Nature Communications, было поддержано грантами от Национального научного фонда. Этот инновационный подход к проектированию роботов может проложить путь к новым достижениям в области искусственных систем, сделав их более адаптивными и функциональными для различных приложений.

 Последние статьи
Последние статьи 


Оставьте комментарий
Отменить